
APOLLO(阿波罗)是由SLAMTEC研发的中小型可扩展机器人开发平台,依靠内置的高性能SLAMWARE自主导航定位系统,可搭载不同应用,并在多种商用环境中开展工作,无需外部环境调整及人为编程设置,接口丰富,可扩展性强,可满足不同应用需求。

不低于15m半徑的環境探測距離,時刻掃描周圍環境
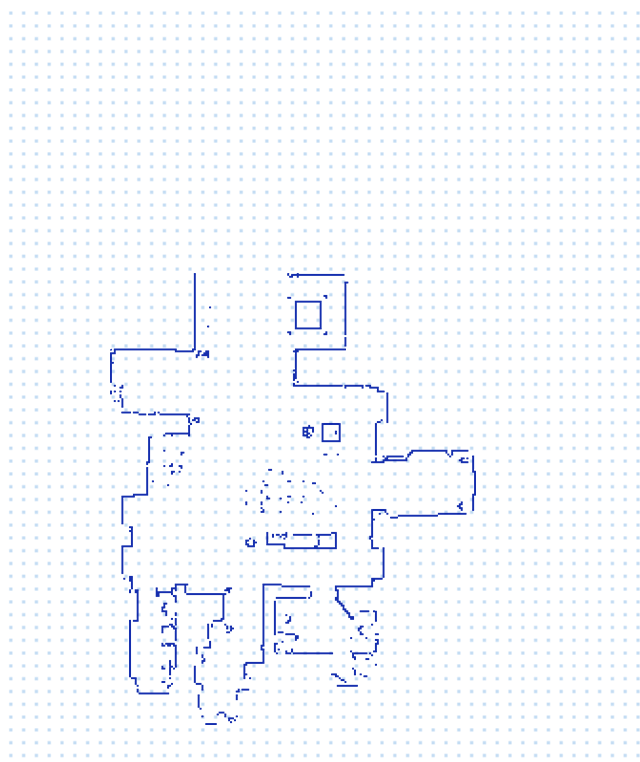
提供地圖數據,構建高精度地圖
并基于該地圖數據實現自主路徑規劃及導航服務
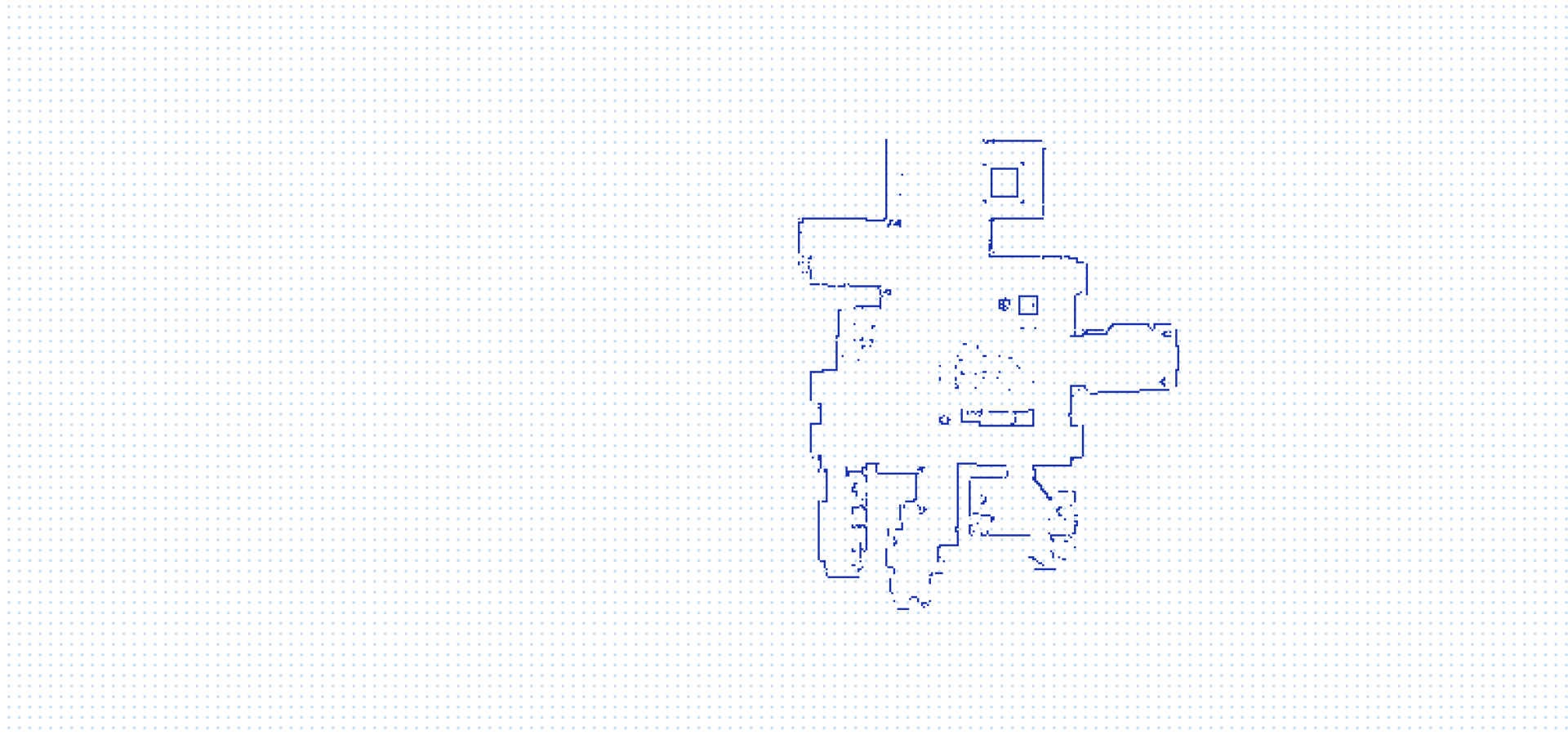
無需人為協助
利用SharpEdge技術構建高精度地圖
多路線巡邏模式
尋找路徑并移動到指定地點
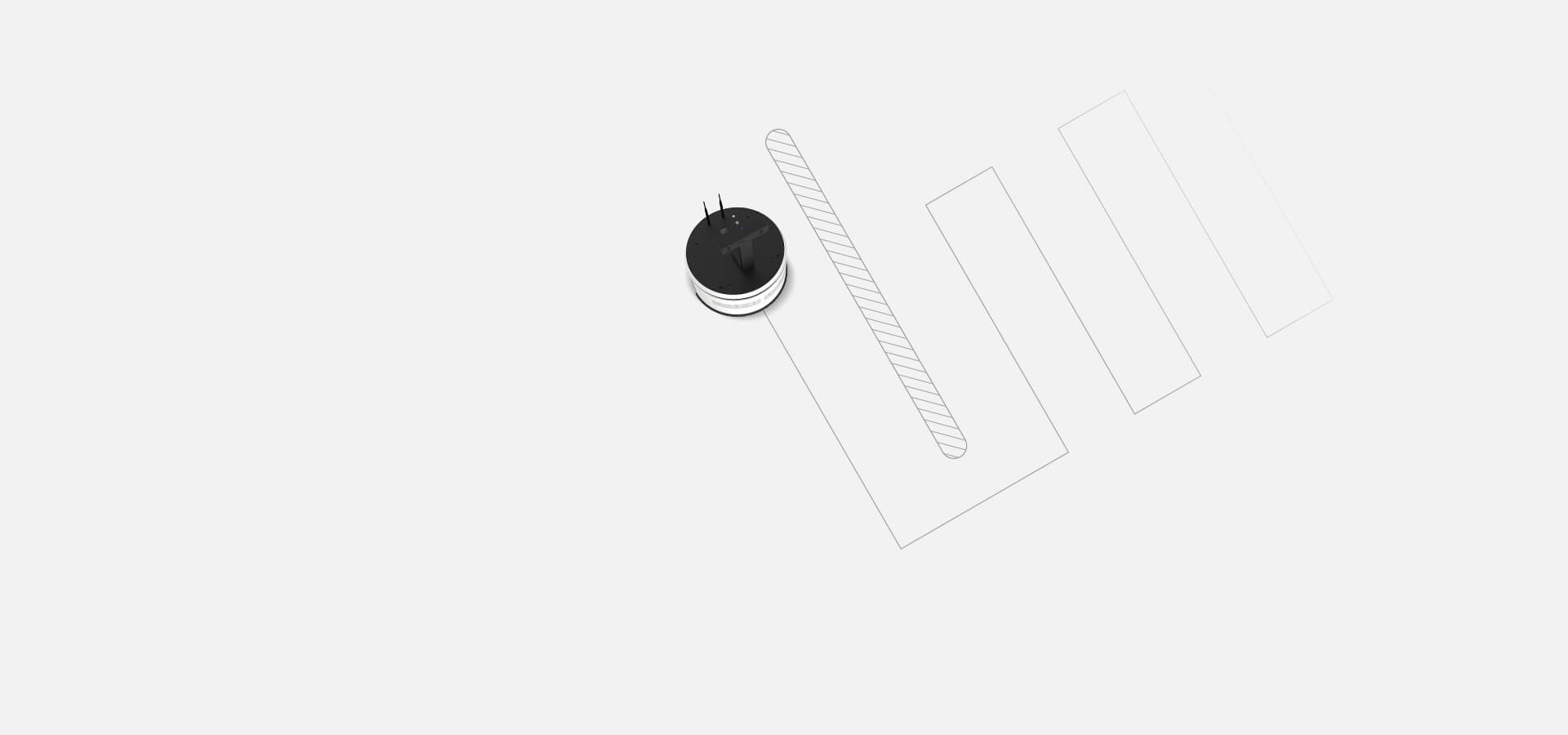
純軟件實現
高效可靠,無需額外輔助鋪設
即可設置機器人活動范圍和行進路線
同時支持物理磁軌隔斷(選配)
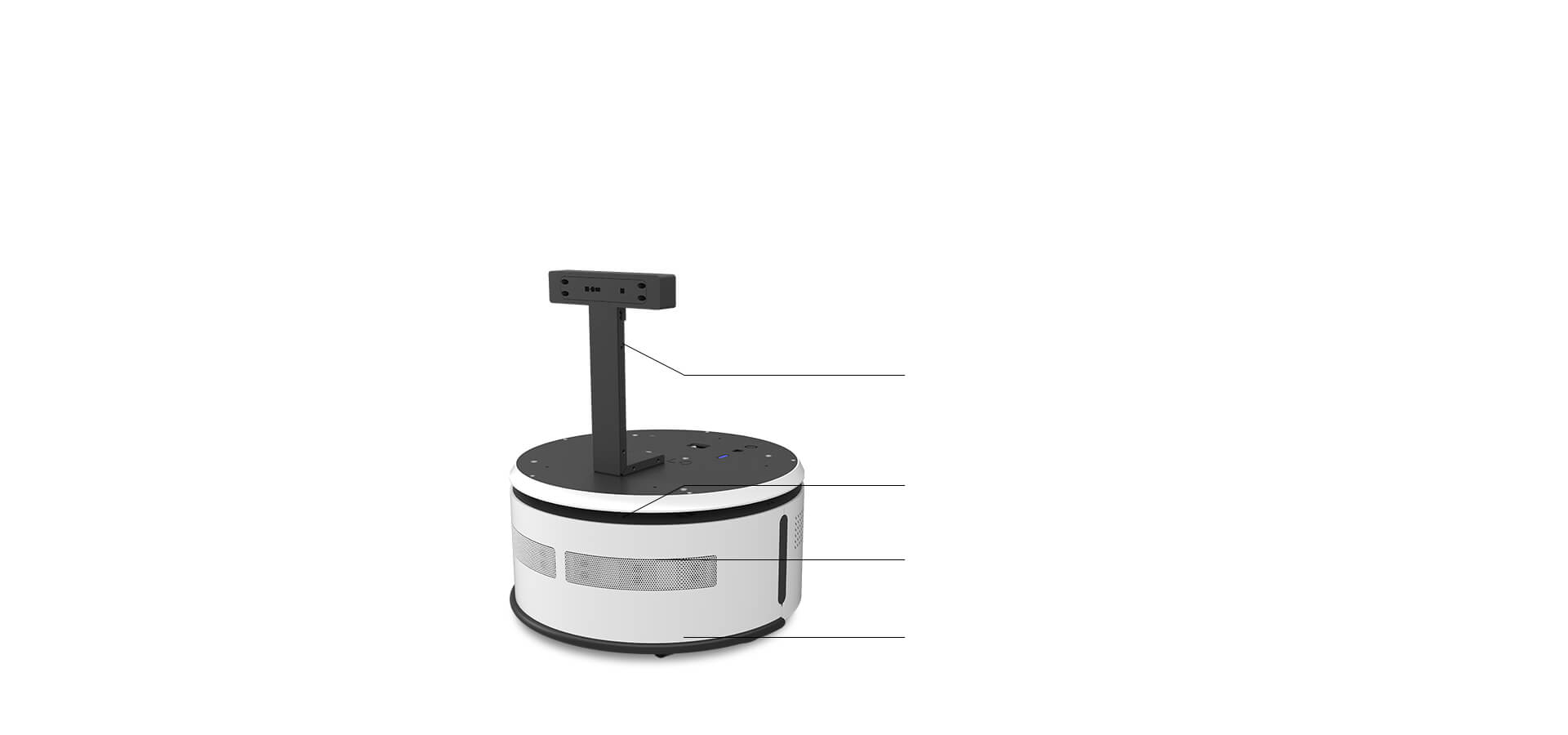
除激光雷達傳感器之外
Apollo還配備深度攝像頭、超聲波、防跌落傳感器
多傳感器數據進行融合導航
靈活面對復雜多變的實際應用情況
提供可靠的現場表現
深度摄像头传感器
激光雷达传感器
超声波传感器
防跌落传感器

支持可外部調度的預約式充電
自主導航定位,自動返回充電塢充電
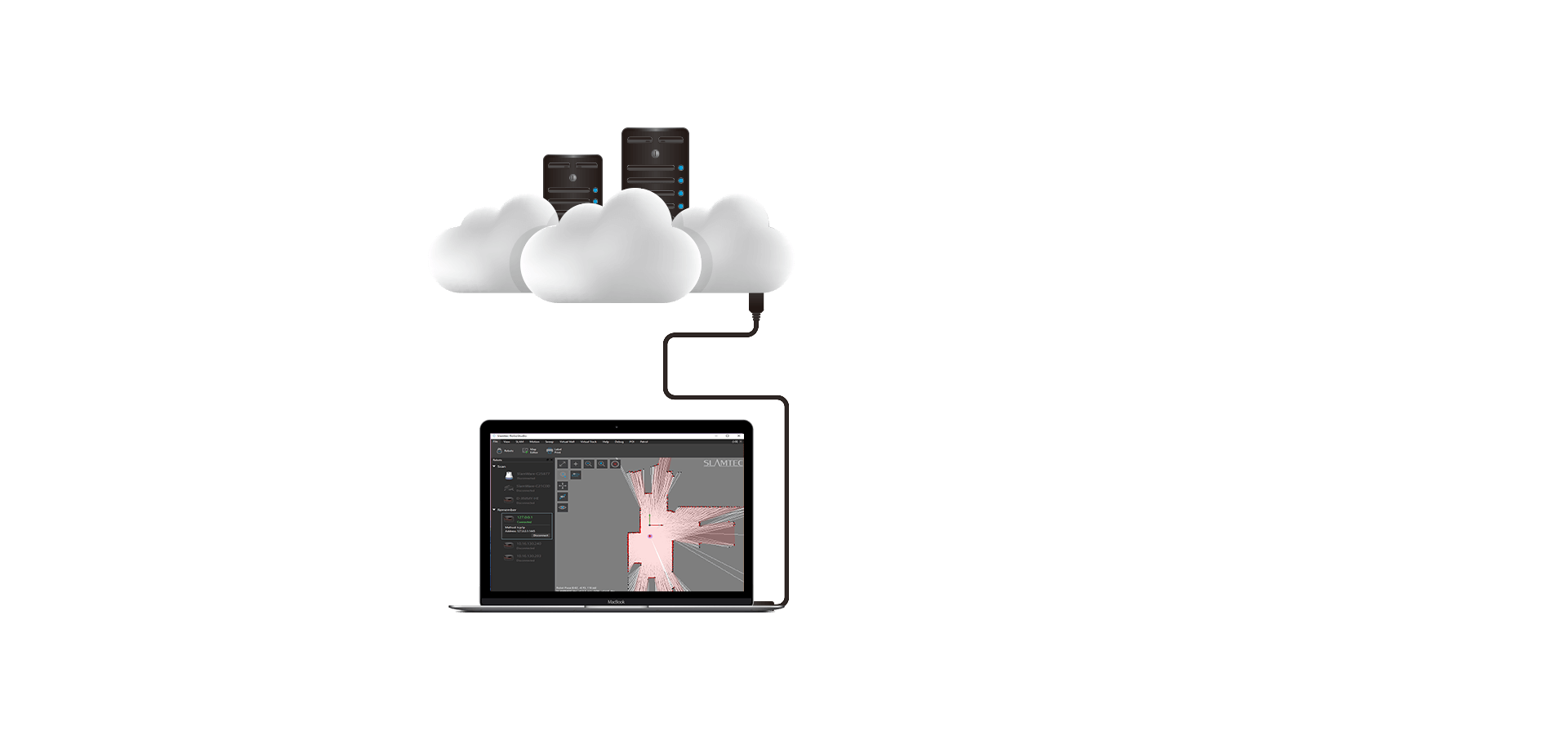
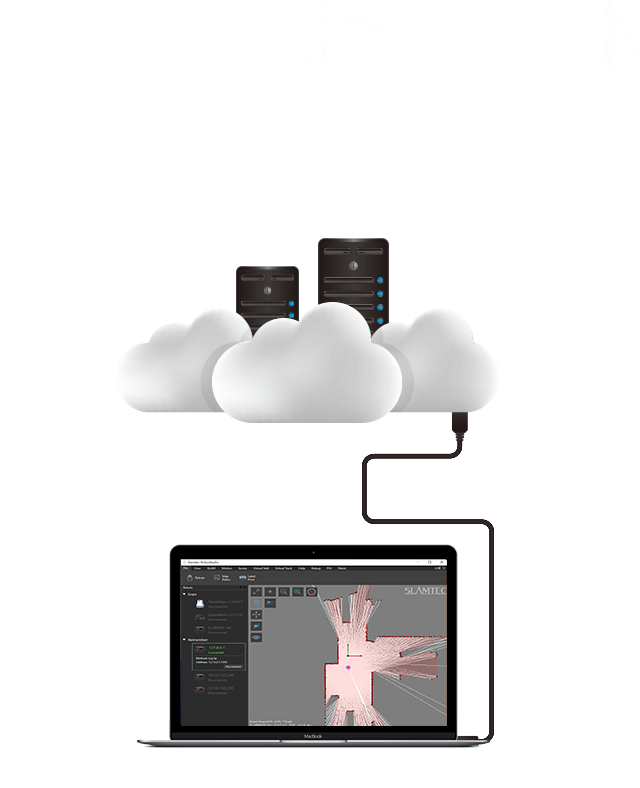
基于思嵐RoboCloud云服務
遠程管理已注冊的Apollo平臺
實現更多擴展功能
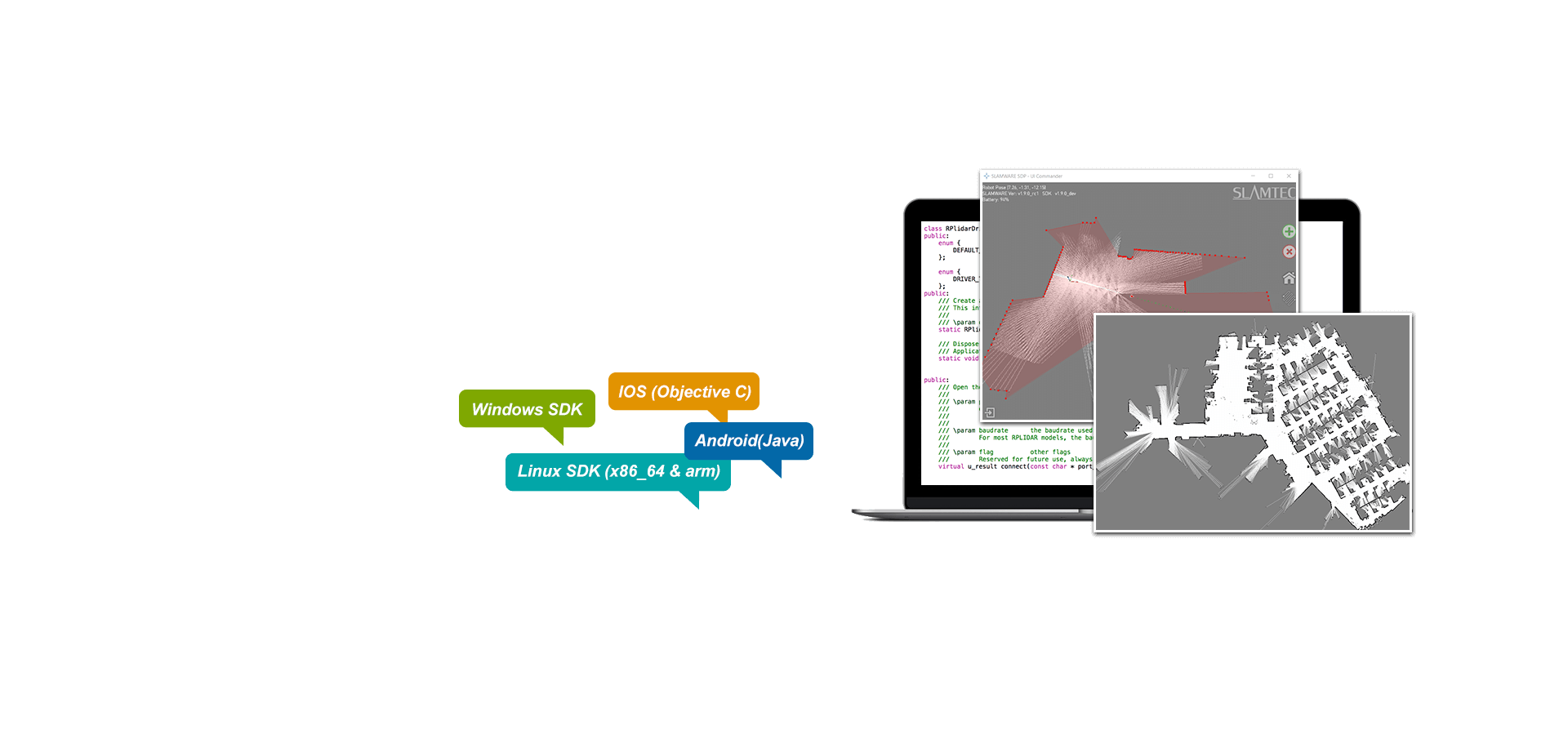
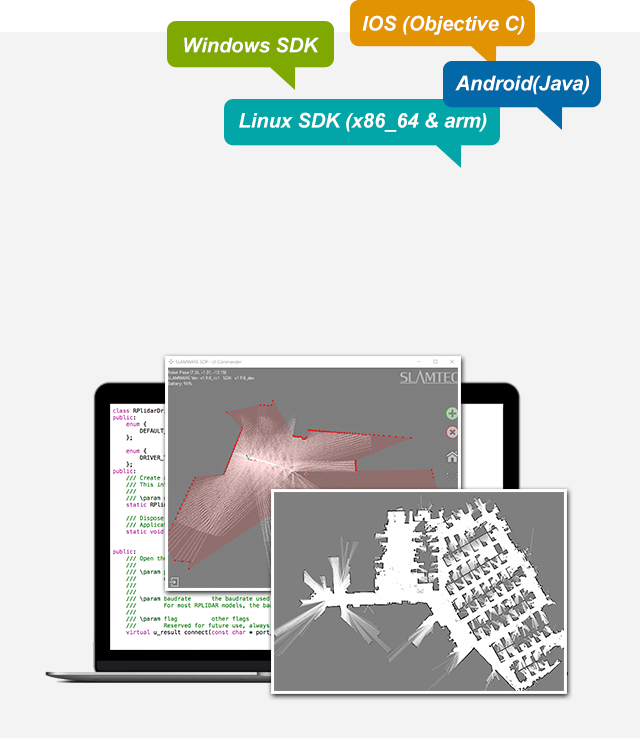
完全開放的軟硬件平臺
提供外擴硬件支持
通過SLAMWARE SDK進行業務邏輯應用開發

自主上下電梯,到達指定地點
隨時監測自身所處樓層
自主構建多樓層地圖
終端用戶隨時隨地查看


思岚科技官方微信
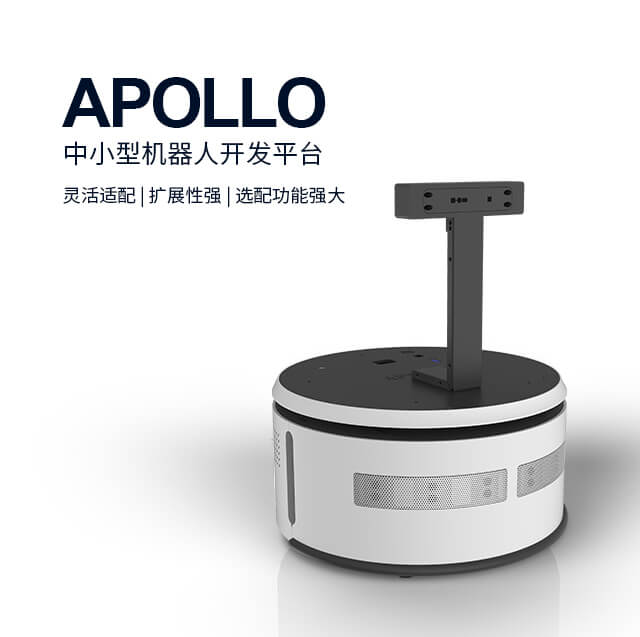

APOLLO(阿波罗)是由SLAMTEC研发的中小型可扩展机器人开发平台,依靠内置的高性能SLAMWARE自主导航定位系统,可搭载不同应用,并在多种商用环境中开展工作,无需外部环境调整及人为编程设置,接口丰富,可扩展性强,可满足不同应用需求。

不低于15m半徑的環境探測距離,時刻掃描周圍環境
提供地圖數據,構建高精度地圖
并基于該地圖數據實現自主路徑規劃及導航服務
無需人為協助
利用SharpEdge技術構建高精度地圖
多路線巡邏模式
尋找路徑并移動到指定地點

純軟件實現
高效可靠,無需額外輔助鋪設
即可設置機器人活動范圍和行進路線
同時支持物理磁軌隔斷(選配)

除激光雷達傳感器之外
Apollo還配備深度攝像頭、超聲波、防跌落傳感器
多傳感器數據進行融合導航
靈活面對復雜多變的實際應用情況
提供可靠的現場表現
深度摄像头传感器
激光雷达传感器
超声波传感器
防跌落传感器

支持可外部調度的預約式充電
自主導航定位,自動返回充電塢充電
基于思嵐RoboCloud云服務
遠程管理已注冊的Apollo平臺
實現更多擴展功能
完全開放的軟硬件平臺
提供外擴硬件支持
通過SLAMWARE SDK進行業務邏輯應用開發

自主上下電梯,到達指定地點
隨時監測自身所處樓層
自主構建多樓層地圖
終端用戶隨時隨地查看
思岚科技官方微信



