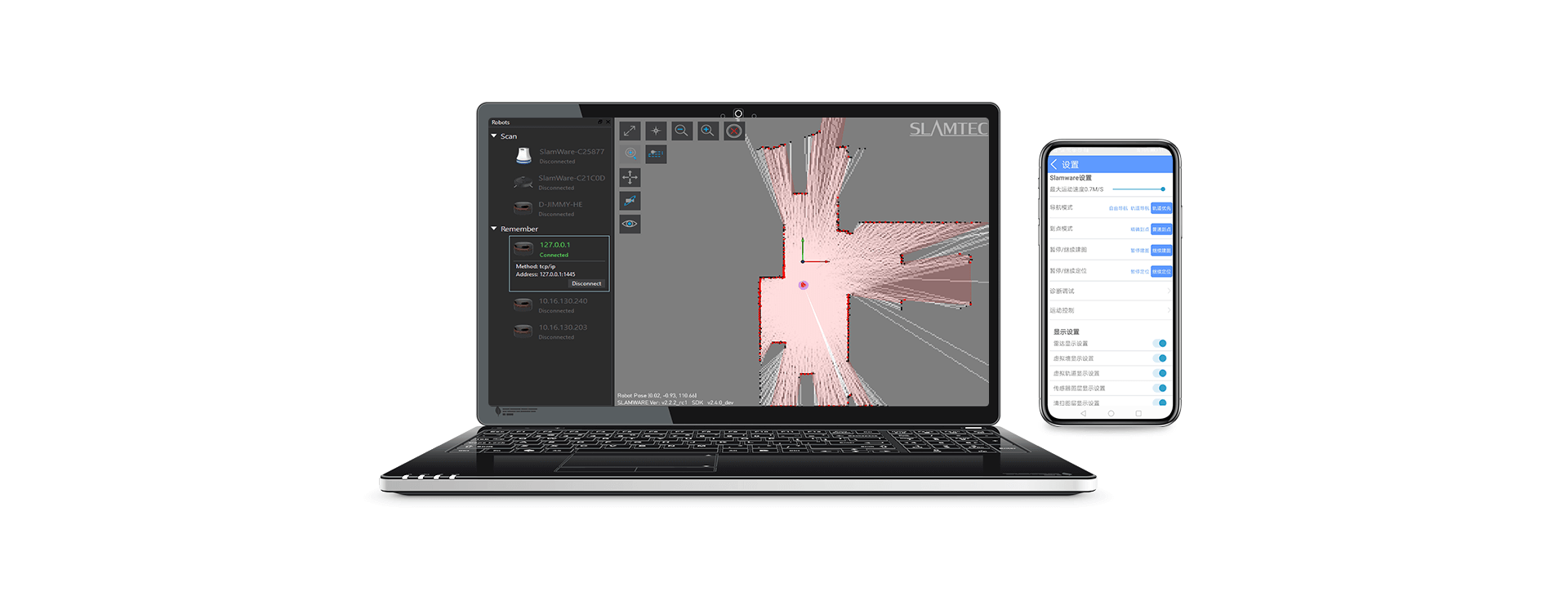
通過與機器人建立通訊,從機器人提供的接口獲取其傳來的傳感器數據、位姿狀態、地圖信息等對數據信息進行再次處理后,通過友好的界面呈現給用戶
也可通過RoboStudio對移動機器人發送指令,實現對機器人的可視化監控
連接移動機器人,通過機器人的接口獲得傳感器數據、地圖、位姿等信息
對機器人進行實時監測與控制
 了解更多 >>>
了解更多 >>>

用户可通过接口实时查看机器人的传感器、地图、位姿等信息

对获取到的机器人信息进行处理,以友好的界面呈献给用户
对机器人发送相应的指令,对其进行实时控制
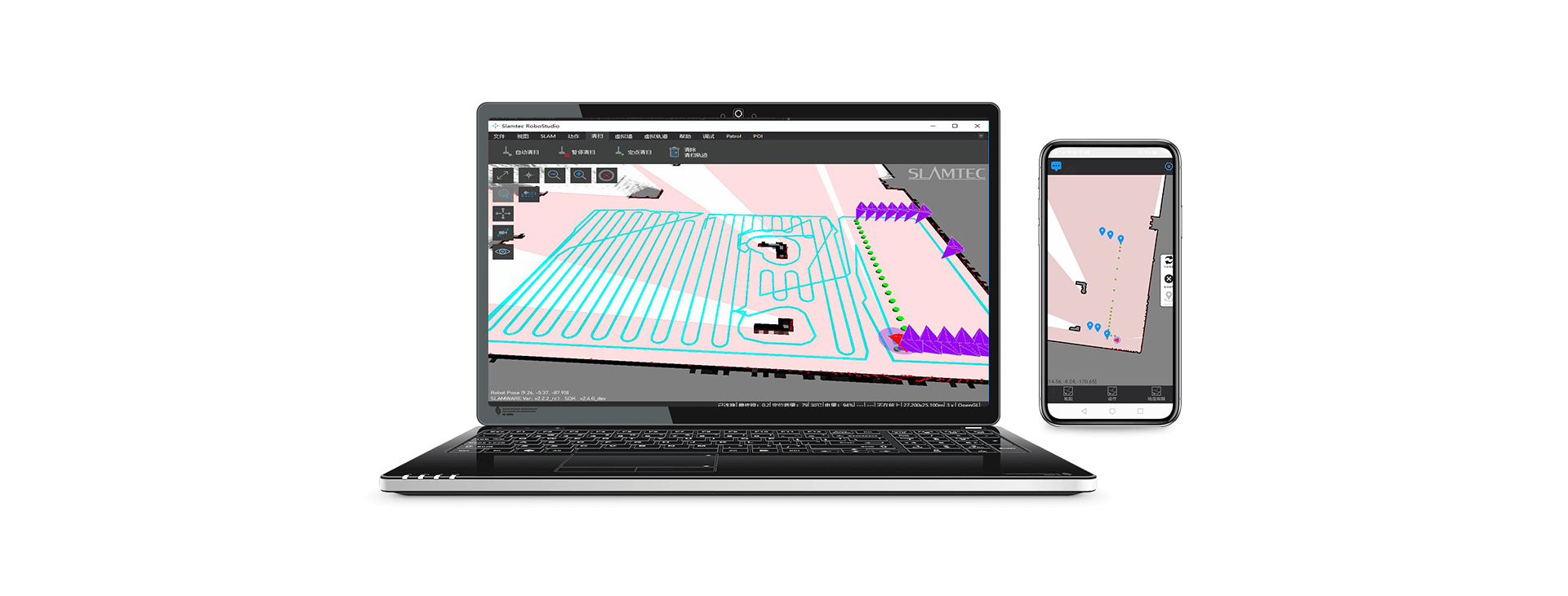
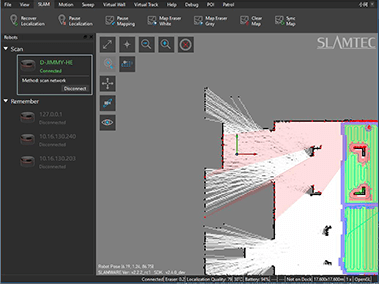
基于純軟件方式,無需額外輔助鋪設
靈活增加、編輯、刪除虛擬墻,限定機器人活動范圍
 了解更多 >>>
了解更多 >>>
虛擬墻技術基于純軟件方式,無需額外輔助鋪設
不需要改變應用場地的實際環境
即可實現移動機器人的虛擬墻避障,限制機器人的活動范圍
同時支持物理磁軌隔斷(選配)

虚拟墙技术可视具体环境情况灵活切换、平移或者变换虚拟墙的位置和形状 适用于多种场景,不存在人工铺设和信号的误差,成本低,精度高
機器人在移動過程中,遇到虛擬墻會自動繞行
會重新智能避障,規劃和導航
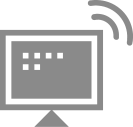
基于純軟件方式,無需額外輔助鋪設
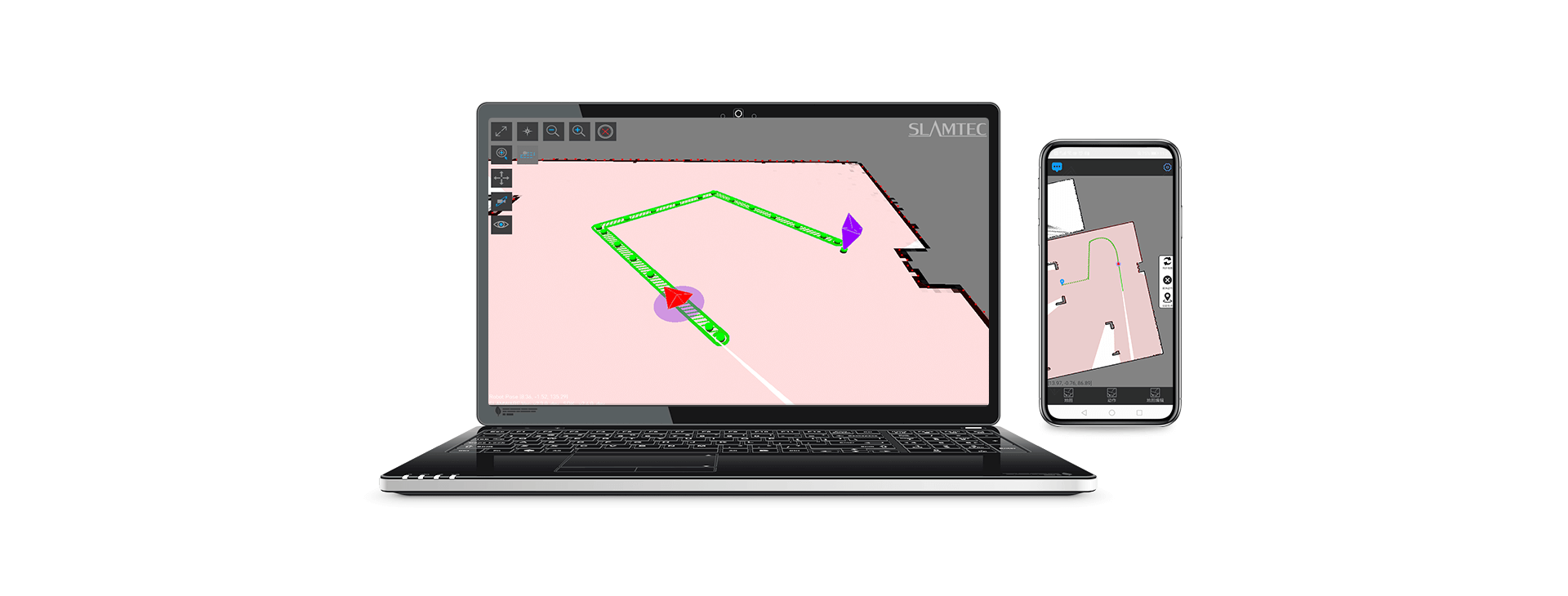
實現移動機器人的智能巡航功能
 了解更多 >>>
了解更多 >>>
虛擬軌道基于純軟件方式,無需額外輔助鋪設
也不需要改變應用場地的實際環境
即可實現移動機器人的智能巡邏、監控
可按照固定軌跡定點實現巡航

虛擬軌道技術可視具體環境情況靈活切換、平移或者變換虛擬軌道的位置和形狀
適用于多種應用場景
不存在人工鋪設和信號的誤差,成本低,精度高
移動機器人在進行虛擬軌道路徑規劃時
會自動搜索距離起始點最近的虛擬軌道關鍵點
并找出到達目標點最近的虛擬軌道路徑
實現自主路徑規劃和導航,避障,最終達到終點
連接 / 斷開機器人,云端/本地數據同步
及時獲取機器人當前狀態、信息,方便移動機器人管理
 了解更多 >>>
了解更多 >>>
基于思嵐的RoboCloud云服務
可在線管理存儲在云端或本地的機器人、地圖信息和狀態信息
自動發現局域網內機器人
連接 / 斷開機器人方便簡單
支持自動重連
無需面臨數據丟失風險
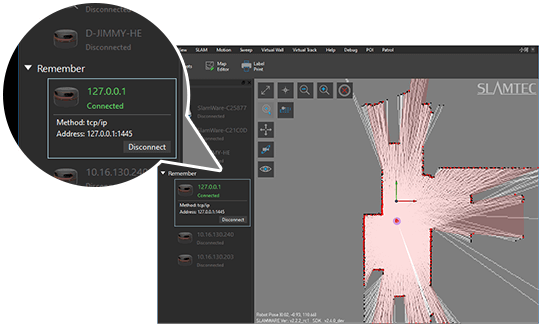
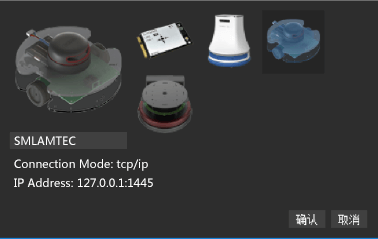
個性化設置機器人昵稱和頭像
方便記憶,無需配置連接屬性

界面友好易上手
強大的功能支持

多種視角模式隨意切換
圖層模式可加減觀察對象

靈活運用插件,滿足不同的場景應用
開放插件接口,供開發者開發定制插件

支持SLAMTEC所有型號器人
兼容SDK接口


思岚科技官方微信