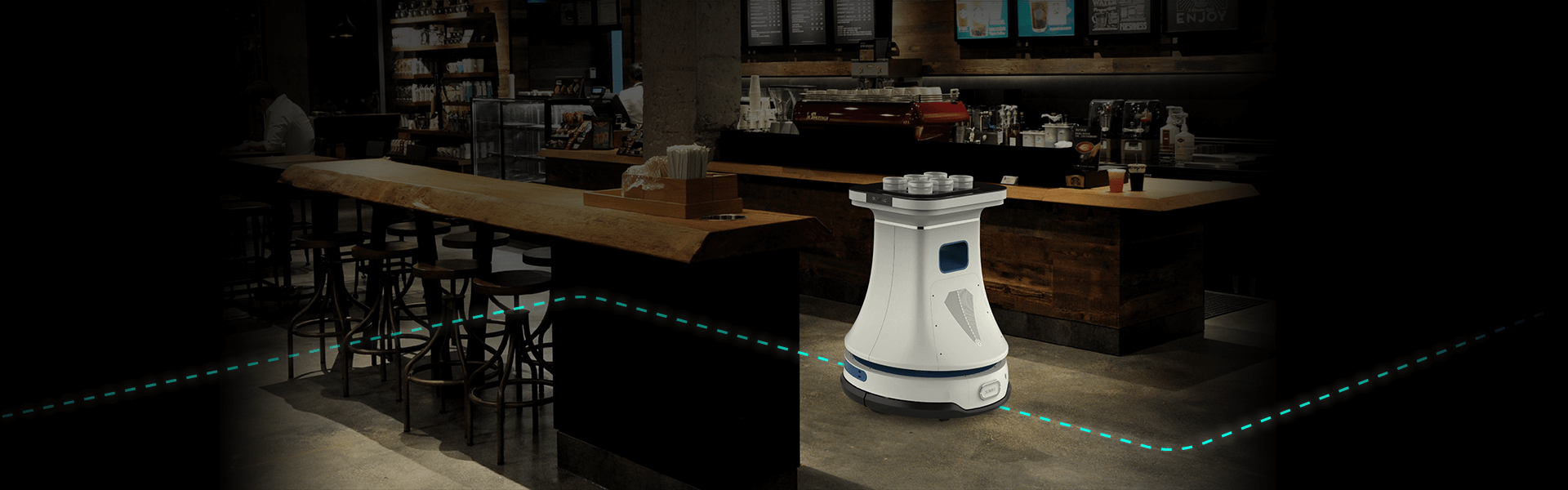

虛擬軌道基于純軟件方式,無需額外輔助鋪設
也不需要改變應用場地的實際環境
即可實現移動機器人的智能巡邏、監控
可按照固定軌跡定點實現巡航

虛擬軌道技術可視具體環境情況靈活切換、平移或者變換虛擬軌道的位置和形狀
適用于多種應用場景
不存在人工鋪設和信號的誤差,成本低,精度高
移動機器人在進行虛擬軌道路徑規劃時
會自動搜索距離起始點最近的虛擬軌道關鍵點
并找出到達目標點最近的虛擬軌道路徑
實現自主路徑規劃和導航,避障,最終達到終點


思岚科技官方微信


