 中小型机器人开发平台Apollo的秘密
中小型机器人开发平台Apollo的秘密
機器人產品在當前仍屬于初階智能階段,還在較多地依賴人,但智能技術的快速迭代與進步也是不容忽視的,并且越來越多地進入到機器人一線應用領域。

機器人概念并不是單純的用來炒作或做噱頭博眼球,在機器人真實落地應用的多個行業終端,包括金融、零售、廣告、養老、政務以及通信運營商等垂直行業中,思嵐科技最新發布的中小型機器人平臺Apollo已成為眾多產品中的明星焦點。
Apollo自主行走的秘密:

擁有多重傳感器的Apollo能有效地避開各種復雜環境中的障礙物并正確實現其路徑規劃與導航的功能。
雷達傳感器
Apollo配備的高性能激光雷達掃描半徑大于15M,掃描頻率為20HZ。基于該雷達提供的地圖數據,Apollo可以構建精度達5cm的地圖并基于該地圖實現自主路徑規劃及導航功能。
超聲波傳感器
Apollo機身總共配置有5枚超聲波傳感器,分布于前方底部邊緣。覆蓋區域為正前方160°,40cm以內區域。該傳感器主要用于探測高透材質的障礙物以優化Apollo建圖及避障性能。
深度攝像頭傳感器
Apollo機身前方上部配置的深度攝像頭傳感器可視角度為45°x35°,最大可視距離為1.3m,它使得Apollo可以偵測到位于雷達掃描平面上方的障礙物并及時發送信號進行規避。
防跌落傳感器
Apollo正前方底部邊緣分布有3枚防跌落傳感器,其最小感應深度約為5cm,當Apollo行至臺階邊緣時,防跌落傳感器將發送信號請求改變機器人前進方向,從而實現防跌落的目的。
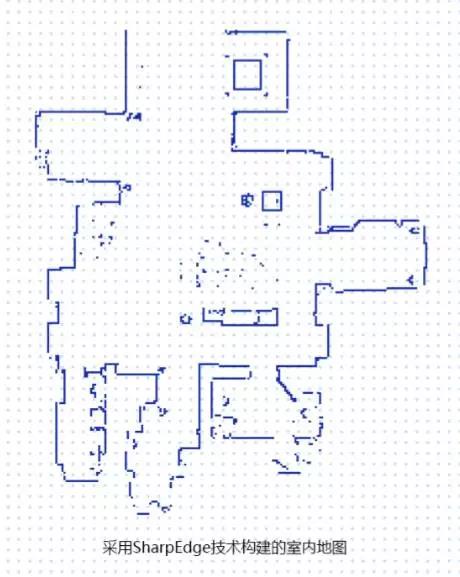
Aopllp配備了SLAMWARE機器人自主定位導航模組,集成了基于激光雷達的SLAM及配套路徑規劃功能,內置運動控制算法,可以實現未知環境中的即時定位、路徑規劃,并直接輸出高達5CM分辨率的機器人周圍環境地圖,且不存在誤差累計問題。

不僅如此,Apollo還可以自主上下電梯,構建多樓層地圖,到達樓層的每一層后,Apollo將自動標記所在樓層,并構建該樓層地圖。構建的多樓層地圖可用于構建各樓層平面圖,購物導航,緊急疏散等,便于終端用戶隨時隨地查看。
虛擬墻及虛擬軌道功能
基于純軟件方式,高效可靠,無需額外輔助鋪設,即可限定機器人活動范圍和行動路線。同時支持物理磁軌隔斷(選配)。
擴展之后的Apollo機器人可以運用到公司接待機器人,商場導購機器人等。自主行走的功能可以幫助機器人針對不同場景下的客戶需求,使得機器人更高的效率為用戶提供更高價值的服務。
雖然機器人產品在當前仍屬于初階階段,但Apollo的出現推動了機器人朝智能化更近一步。
關鍵字:激光雷达,SLAM


思岚科技官方微信



