 关于电机里程计,你还有这些不知道的事儿
关于电机里程计,你还有这些不知道的事儿
說到機器人自主定位導航解決方案及技術,大家腦海里肯定會浮現“定位”、“建圖”、“避障”、“路徑規劃”等字眼。
在思嵐提供的自主定位導航解決方案中,主要是通過雷達和里程計的數據來進行定位。雖然激光雷達在一定范圍之內會糾正里程計的誤差,但在某些特殊環境下(如雷達掃描的有效點較少時),里程計的準備度還是會影響定位的效果。
因此,對于需要自主定位導航的服務機器人而言,電機里程計的精準度,往往是決定整個機器人定位精度的關鍵因素之一。
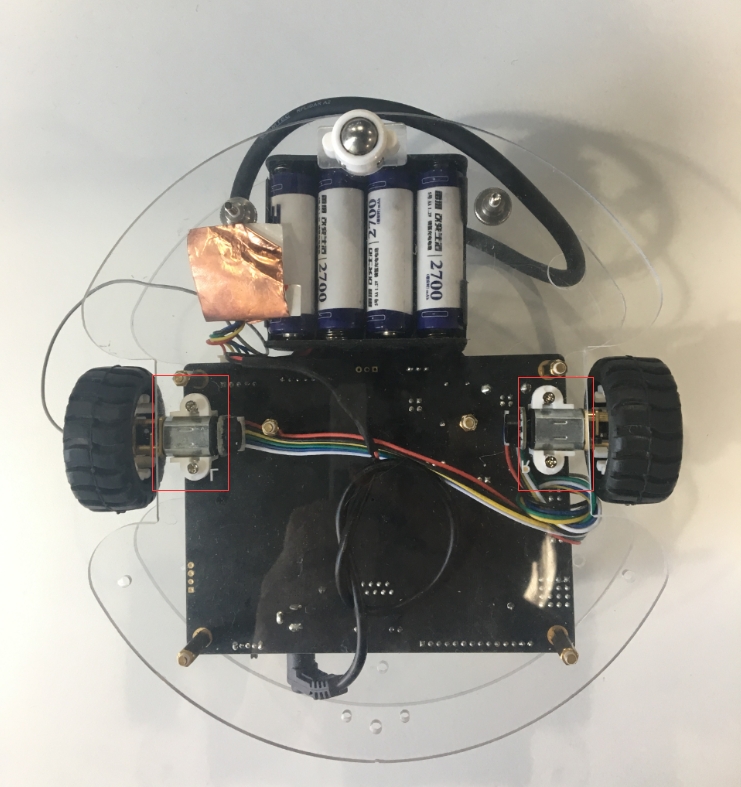
SDP Mini 里程計
里程計類型的選擇:
常用的機器人底盤電機編碼器按實現原理來分類,包括光電編碼器及霍爾編碼器;按照其編碼方式分類,主要包括增量型和絕對型。對于基于slamware的機器人底盤來說,里程計的分辨率需要在1mm以下,且總誤差最多不能超過5%,如果超過此數值,機器人將無法正常實現定位導航的功能。因此,無論選擇哪種編碼器,必須要達到其精度的要求。可以參考以下判斷公式:
(2π/每轉編碼器脈沖數)×輪子半徑≤0.001米
注:輪子半徑單位為米
系統電機應答流程:
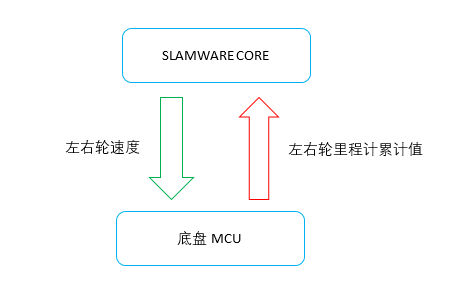
(以兩輪差動電機為例)
SLAMWARE Core 每間隔delta時間,會向底盤發送左右輪的速度,向前為正,向后為負,即SET_BASE_MOTOR(0x40)。底盤會回復此時的左右輪里程計的累計值,即GET_BASE_MOTOR_DATA(0x31)。
請注意,無論輪子向前運動或向后運動,里程計的度數均遞增,因為SLAMWARE Core在下發速度時,已經區分了向前還是向后。
SLAMWARE Core發送SET_BASE_MOTOR的請求報文為, 速度的單位為mm/s:
里程計代碼示例詳見:
SET_BASE_MOTOR
typedefstruct_base_set_motor_request
{
_s32 motor_speed_mm[4];
} __attribute__((packed)) base_set_motor_request_t;
對應下面的代碼:
SET_BASE_MOTOR
caseSLAMWARECORECB_CMD_SET_BASE_MOTOR:
{
base_set_motor_request_t *ans_pkt = (base_set_motor_request_t *) request->payload;
if(!bumpermonitor_filter_motorcmd(ans_pkt->motor_speed_mm[0], ans_pkt->motor_speed_mm[1])) {
set_walkingmotor_speed(ans_pkt->motor_speed_mm[0], ans_pkt->motor_speed_mm[1]);
}
net_send_ans(channel, NULL, 0);
}
break;
底盤會通過響應GET_BASE_MOTOR_DATA, 將左右輪的累計里程發給SLAMWARE Core,響應報文為,距離單位為mm:
GET_BASE_MOTOR_DATA
typedefstruct_base_motor_status_response
{
_s32 motor_cumulate_dist_mm_q16[4];
} __attribute__((packed)) base_motor_status_response_t;
對應的代碼:
GET_BASE_MOTOR_DATA
caseSLAMWARECORECB_CMD_GET_BASE_MOTOR_DATA:
{
base_motor_status_response_t ans_pkt;
memset(&ans_pkt, 0, sizeof(ans_pkt));
ans_pkt.motor_cumulate_dist_mm_q16[0] = (_s32) (cumulate_walkingmotor_ldist_mm());
ans_pkt.motor_cumulate_dist_mm_q16[1] = (_s32) (cumulate_walkingmotor_rdist_mm());
net_send_ans(channel, &ans_pkt, sizeof(base_motor_status_response_t));
}
break;
里程計部分代碼示例:
每米編碼器脈沖數ODOMETER_EST_PULSE_PER_METER,需要根據每轉編碼器脈沖數以及輪子的直徑來確定,公式如下:
每米編碼器脈沖數=每轉編碼器脈沖數/(π×輪子直徑)
注:輪子直徑單位為米
Odometry
//每米編碼器脈沖數
#define ODOMETER_EST_PULSE_PER_METER 6390UL
//行走電機速度控制頻率:60hz
#define CONF_MOTOR_HEARTBEAT_FREQ 60
#define CONF_MOTOR_HEARTBEAT_DURATION (1000/(CONF_MOTOR_HEARTBEAT_FREQ))
/*
* 刷新行走電機的里程數據函數
*/
staticvoid_refresh_walkingmotor_odometer(_u32 durationMs)
{
_u32 irqSave = enter_critical_section(); //臨界資源保護
for(size_tcnt = 0; cnt < WALKINGMOTOR_CNT; ++cnt) {
_lastEncoderTicksDelta[cnt] = _encoderTicksDelta[cnt]; //獲得delta時間內編碼器的脈沖數
_motorAccumulatedTicks[cnt] += _encoderTicksDelta[cnt]; //獲得累計編碼器的脈沖數
_encoderTicksDelta[cnt] = 0;
}
leave_critical_section(irqSave);
if(durationMs == 0) //防止除零
durationMs = 1;
for(size_tcnt = 0; cnt < WALKINGMOTOR_CNT; ++cnt) { //根據delta的編碼器數據計算這段時間內速度,即當前速度
_lastOdometerSpeedAbs[cnt] = (float) _lastEncoderTicksDelta[cnt] * (1000.0 / ODOMETER_EST_PULSE_PER_METER) * 1000.0 / durationMs;
}
}
/*
* 計算左行走電機累計里程函數
* 單位:mm
*/
_u32 cumulate_walkingmotor_ldist_mm(void)
{
return(_motorAccumulatedTicks[WALKINGMOTOR_LEFT_ID] * 1000) / ODOMETER_EST_PULSE_PER_METER;
}
/*
* 計算右行走電機累計里程函數
* 單位:mm
*/
_u32 cumulate_walkingmotor_rdist_mm(void)
{
return(_motorAccumulatedTicks[WALKINGMOTOR_RIGHT_ID] * 1000) / ODOMETER_EST_PULSE_PER_METER;
}
那么,對于里程計而言,我們該如何判斷其定位數據是否準確呢?下面,就要借助可擴展的機器人管理與開發應用軟件:Robo Studio

首先,先將準備工作做好:
在調試之前,請找到一處合適測試的區域,該區域需有清晰的邊界,比如,矩形的空房間。安裝好Robo Studio,并連接上機器人(如SDP Mini)。Robo Studio下載鏈接及在線文檔可至思嵐官網下載安裝。
利用Robo Studio調試里程計準確度測試方法:
1.將機器人控制到離一面直墻若干米的位置,面朝直墻,如下圖所示。

2.將之前建好的地圖清除掉,點擊清空地圖,此時,機器人當前的區域會重建。當前區域重建好之后,可以點擊暫停建圖,停止地圖更新。最后,可以將暫停定位開啟,開啟后,將關閉激光定位,僅用里程計的數據來定位。

3.控制機器人向前朝墻運動,觀察激光點是否和墻重合,如果和墻重合,證明里程計較為準確;
如果激光點超出墻,證明底盤上報的里程計數據要大于實際運動的距離,里程計偏大。
如果激光點在墻之內,證明底盤上報的里程計數據要小于實際運動的距離,里程計偏小。
如果激光點和墻重合,可以繼續控制機器人倒退,左右轉動,看看激光點是否和周圍環境匹配;
關鍵字:激光雷达,SLAM


思岚科技官方微信



