 基于SLAMWARE的机器人底盘传感器安装指南
基于SLAMWARE的机器人底盘传感器安装指南
2018/12/13 上午3:03:28
機器人底盤中傳感器安裝不當,對機器人定位、建圖及避障等會產生重要影響,基于slamware解決方案的機器人底盤常用傳感器應該如何安裝呢?以及安裝中有什么需要注意的呢?本文將為大家一一闡述!
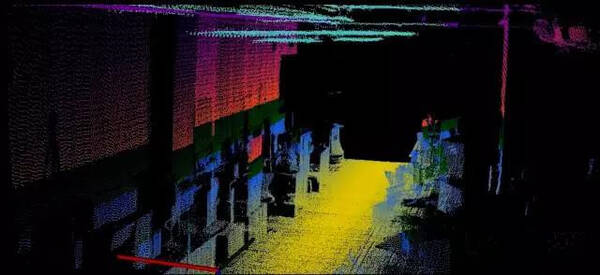
2D激光雷达如何实现3D应用?
2018/12/12 上午6:37:39
2D激光雷達除了實現定位、建圖、多點觸摸等應用外,還能用來做3D建模與環境掃描。肯定會有人好奇,2D激光雷達掃描出來的圖像應該是平面圖,怎么將2D平面圖變為三維的立體圖呢?
如何使用Robostudio加载地图?
2018/12/10 上午5:49:21
本文解釋了關于加載地圖的操作步驟,以及整個流程中需要注意的事項,比如,重定位是加載地圖必不可少的一步,經常會被用戶忽略。建議操作過程中,按照以下步驟進行。
如何使用思岚robostudio进行地图优化?
2018/12/7 上午2:31:38
當初用戶在建圖的過程可能會出現地圖漂移,無法閉環,地圖輪廓不清晰等問題。針對此問題大家可使用思嵐自主研發的robostudio軟件來進行地圖優化,本文將基于robostudio的 map optimization 插件的地圖優化方法進行詳細解說。
如何构建一张满足机器人导航需求的地图?
2018/12/6 上午1:59:56
定位導航技術使機器人即使在無人操控的情況下,也可實現自主行走、避障及順利到達目的地,機器人和人類繪制地圖一樣,在描述環境及認識環境的過程中都需要依靠地圖,它主要利用地圖類描述其當前環境信息,并隨著使用的算法與傳感器差異采用不同的地圖描述形式,所以構建一張可靠的地圖對機器人有著極其重要的作用,那如何構建滿足機器人導航需求的地圖呢?本文內容不可錯過(主要針對采用思嵐定位導航技術的用戶)!



思岚科技官方微信




