 新手入门SLAM必备资料
新手入门SLAM必备资料
2018/9/17 上午2:37:14
搜集了各大網絡,請教了SLAM大神,終于把SLAM的入門資料搜集全了!在分享資料前,我們先來看看,SLAM技術入門前需要具備哪些知識?首先學習SLAM需要會C和C++,網上很多代碼還用了11標準的C++。第二要學會用Linux。第三要會cmake,vim/emacs及一些編程工具。第四要會用openCV, PCL, Eigen等第三方庫。只有學會了這些東西,才能真正上手編一個SLAM系統。如果要跑實際機器人,還要會ROS。
SLAM究竟是什么?让你从0到1了解SLAM
2018/9/13 上午10:15:24
SLAM是Simultaneous localization and mapping縮寫,意為“同步定位與建圖”,主要用于解決機器人在未知環境運動時的定位與地圖構建問題,為了讓大家更多的了解SLAM,以下將從SLAM的應用領域、SLAM框架、SLAM分類(基于傳感器的SLAM分類)來進行全面闡述,本文僅對沒有接觸過SLAM的新人進行的科普。

基于SLAMWARE,如何集成机器人通用底盘部分
2018/5/18 上午8:04:58

SLAMWARE ,機器人自主定位導航解決方案,內含核心算法模塊SLAMWARE Core,可自行設計底盤主板,或直接集成,形成通用的機器人底層部分,幫助機器人實現室內定位導航功能。
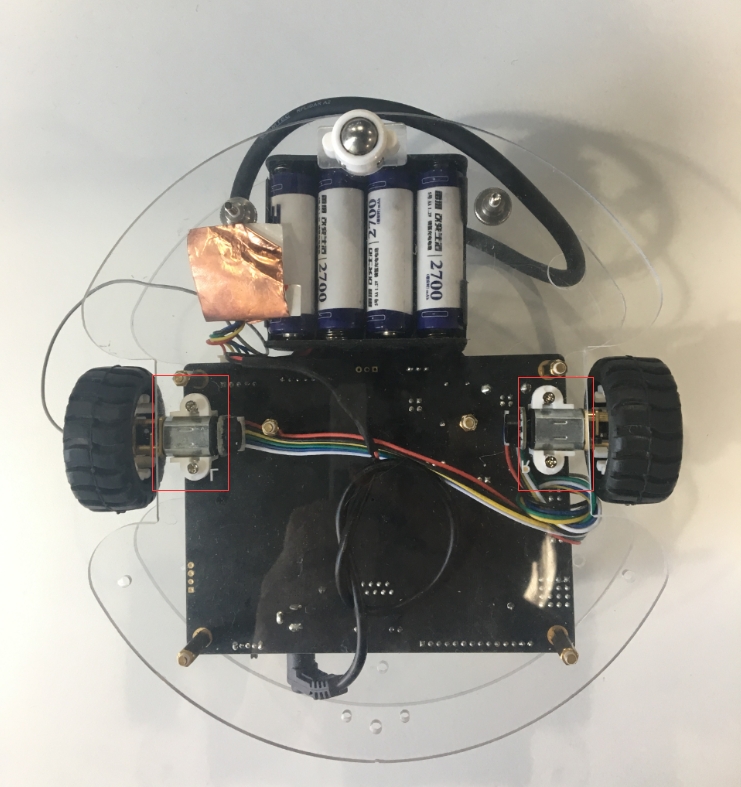
关于电机里程计,你还有这些不知道的事儿
2018/5/17 上午5:59:47
在思嵐提供的自主定位導航解決方案中,主要是通過雷達和里程計的數據來進行定位。雖然激光雷達在一定范圍之內會糾正里程計的誤差,但在某些特殊環境下(如雷達掃描的有效點較少時),里程計的準備度還是會影響定位的效果。
简单6招,快速构建符合导航需求的地图
2018/4/17 上午3:42:56

地圖作為機器人自主定位、避障、規劃路線的依據之一,其重要程度不言而喻。
雷達作為建圖的重要工具,在整個自主定位導航過程中充當著“眼睛”的角色,以思嵐的RPLIDAR 建圖作案例說明。


思岚科技官方微信




